Autonomous Mobile Trolley Robot: Int-Cart
DOI:
https://doi.org/10.37934/spaset.1.1.19aKeywords:
Autonomous, navigation, trolley, obstacle, shopping mallsAbstract
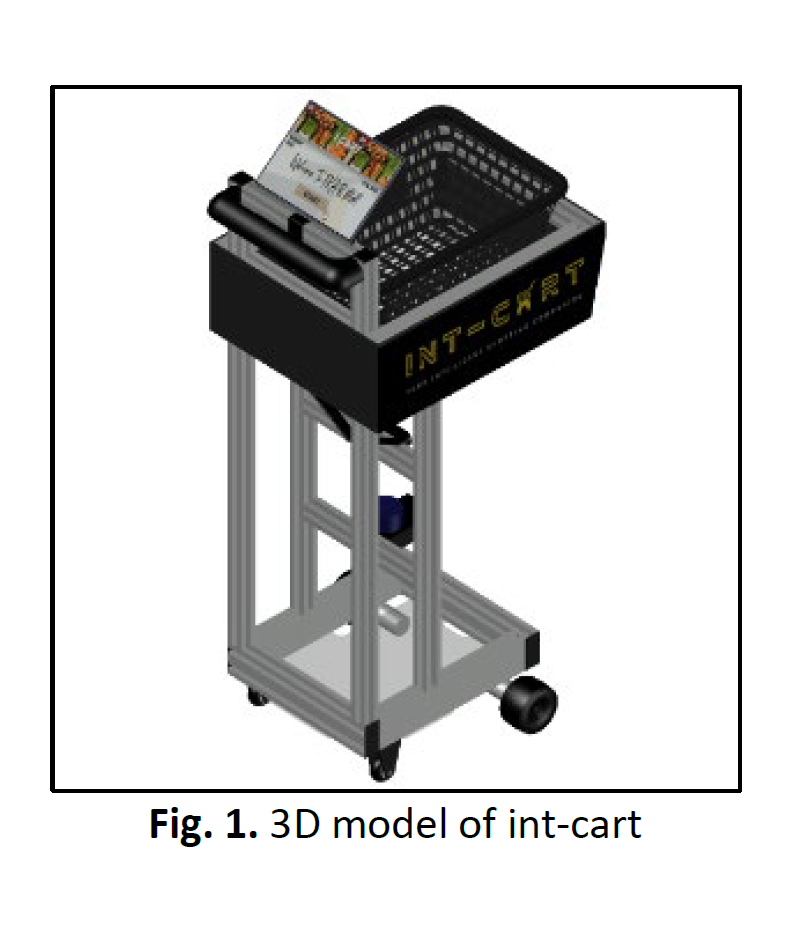
Int-Cart is an autonomous shopping cart designed to provide a convenient and centralized location for consumers to engage in shopping activity. The cart addresses common shopping challenges, including difficulty in finding desired items and limited cart maneuverability. It features dual-mode configurations—following and navigation modes—and is equipped with a LiDAR sensor and RealSense camera for store mapping and obstacle detection. A display monitor allows users to select their preferred cart mode and view the price of selected items. Int-Cart aims to promote inclusive engagement for the elderly, parents with tots, and people with disabilities, aligning with the growing consumer demand for eco-friendly and responsible industry practices. The project is expected to benefit disabled individuals, parents with young children, and elderly shoppers in shopping malls and retail environments.