Computer-Based FTC System for Flexible Robot Manipulator System under Actuator and Sensor Faults
DOI:
https://doi.org/10.37934/spaset.1.1.7683aKeywords:
Computer-based, fault tolerant control, adaptive PID controller, actuator and sensor faultsAbstract
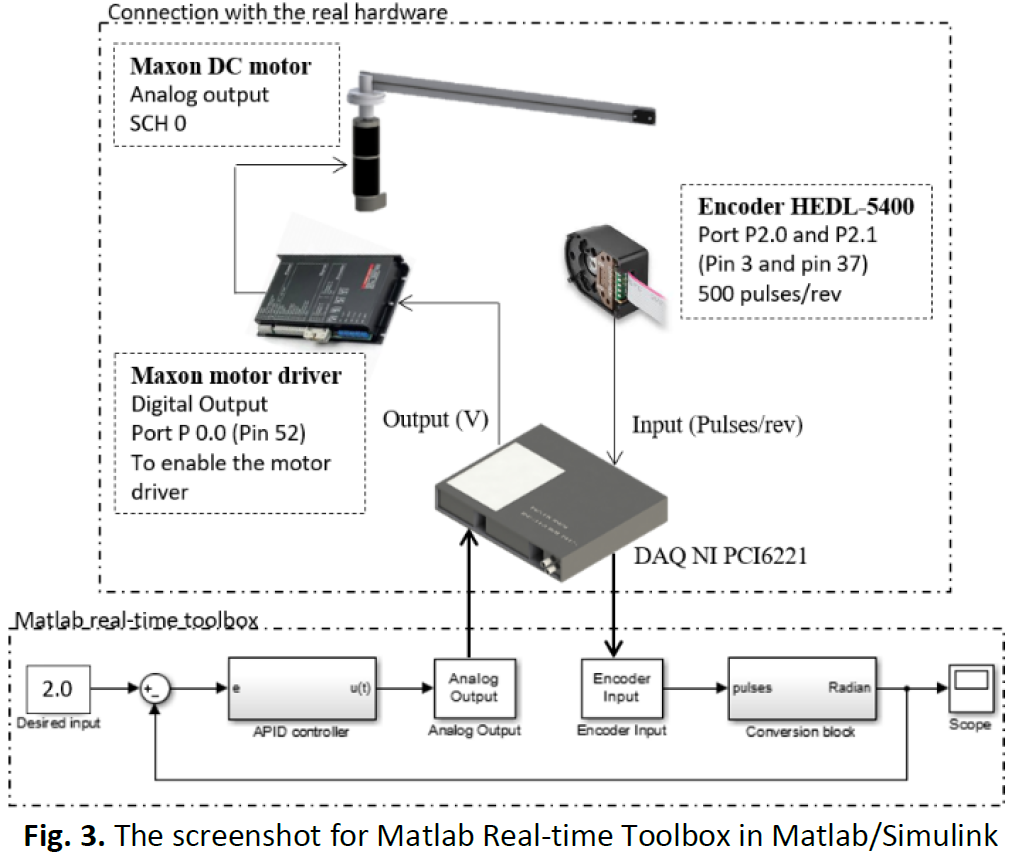
Industry demand high reliability in their system especially in a hazardous working environment. This work proposed a computer-based Fault Tolerant Control (FTC) system under simultaneous actuator and sensor faults of a flexible robot manipulator system under the event of loss effectiveness on more than one component can be a critical fault scenario in industrial system. This proposed method is simulated using a Matlab/Simulink software that interface with a data acquisition (DAQ) NI-PCI6221 board using an ISA bus data communication. In this approach, the FTC system has an adaptive feature where it able to accommodate the faults automatically using an adaptive proportional-integral-derivative (APID) controller. Unlike the conventional PID controller, all the proposed APID control parameters, namely, , , and are adjusted online through online adaptation laws even under variation of fault scenarios. The proposed APID controller is shown to provide an accurate positioning control with faster response even under the variation of types of faults using the computer-based measurement in DAQ system and control systems that is designed based on the real-time Matlab/Simulink toolbox as compared to the conventional PID controller.
Industry demand high reliability in their system especially in a hazardous working environment. This work proposed a computer-based Fault Tolerant Control (FTC) system under simultaneous actuator and sensor faults of a flexible robot manipulator system under the event of loss effectiveness on more than one component can be a critical fault scenario in industrial system. This proposed method is simulated using a Matlab/Simulink software that interface with a data acquisition (DAQ) NI-PCI6221 board using an ISA bus data communication. In this approach, the FTC system has an adaptive feature where it able to accommodate the faults automatically using an adaptive proportional-integral-derivative (APID) controller. Unlike the conventional PID controller, all the proposed APID control parameters, namely, , , and are adjusted online through online adaptation laws even under variation of fault scenarios. The proposed APID controller is shown to provide an accurate positioning control with faster response even under the variation of types of faults using the computer-based measurement in DAQ system and control systems that is designed based on the real-time Matlab/Simulink toolbox as compared to the conventional PID controller.