Finite Element Model Updating of a Soft Pneumatic Gripper Using Genetic Algorithm and Abaqus-Based Hyperelastic Calibration
DOI:
https://doi.org/10.37934/sej.14.1.175185Keywords:
Genetic Algorithm, FEMU, Abaqus, Hyperelastic Calibration, Soft Gripper, Mooney–Rivlin, Optimization, Python AutomatioAbstract
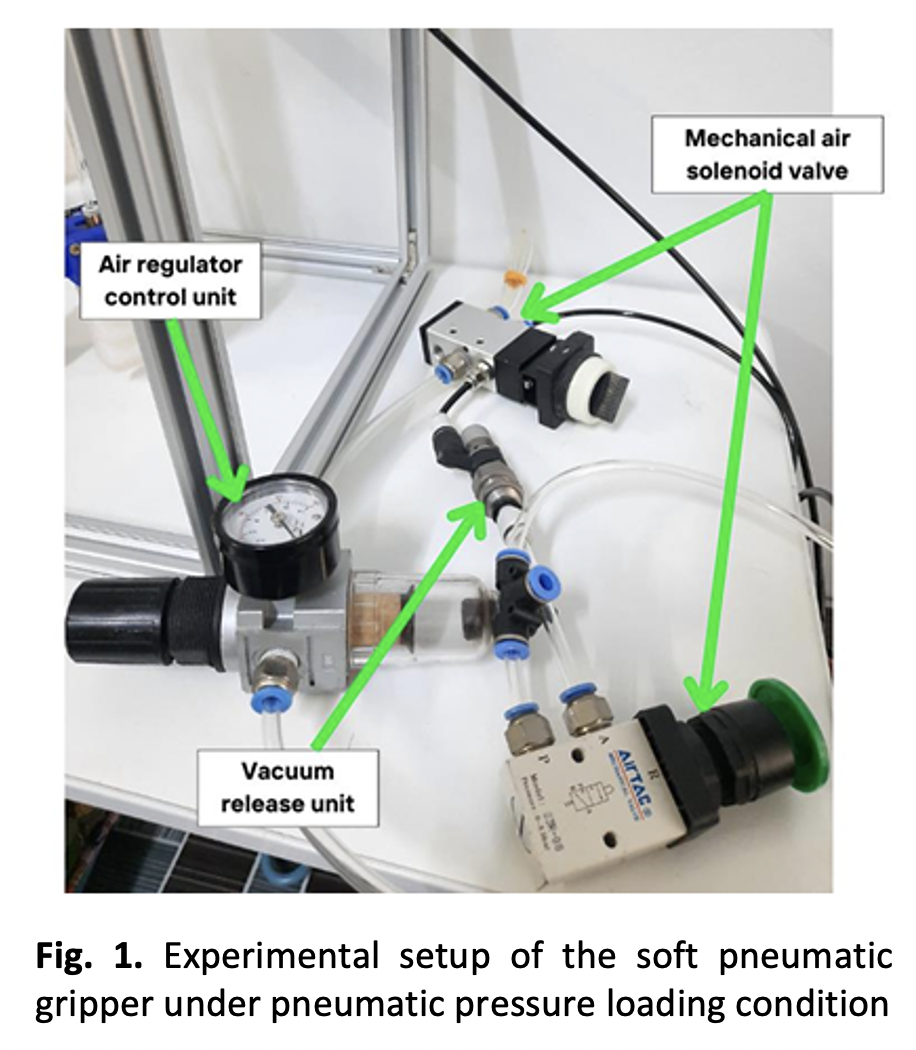
This study presents a finite element model updating (FEMU) framework for the calibration of hyperelastic material parameters of a soft pneumatic gripper using a genetic algorithm integrated with Abaqus finite element analysis and Python scripting. The proposed framework was developed to reduce the displacement error between experimental and simulation responses through an automated optimization process. The optimization focuses on the calibration of the Mooney–Rivlin hyperelastic constants C10 and C01 under pneumatic loading conditions. Experimental displacement values at Node 4401 and Node 5848 were used as target responses during the optimization process. The developed Python workflow automatically updates material parameters, submits Abaqus jobs, extracts displacement responses from the output database, evaluates root mean square (RMS) error, and generates convergence plots and optimization figures. The optimization results demonstrate that the proposed framework successfully improves the agreement between experimental and simulation responses.